
Matrícula em Projeto Final de Curso 1 e 2 para 2024/1
Período de matrícula:
- 11/03 (0h00) a 22/03 (23h59)
Formulários para solicitação de matrícula:
Mais detalhes: http://mecatronica.unb.br/index.php/pt/informacoes-academicas/pfc
Dentre outros requisitos, para matrícula em PFC1 é necessário ter integralizado 70% da carga horária total do curso; para matrícula em PFC2 é preciso enviar o relatório de PCF1 aprovado pelo orientador e com pelo menos 15 páginas de elementos textuais, utilizando o modelo disponibilizado pela coordenação de curso.
Sugestões de temas para PFC1
A lista será atualizada de acordo com o envio de sugestões pelos orientadores.
Orientador: Alberto Alvares (ENM)
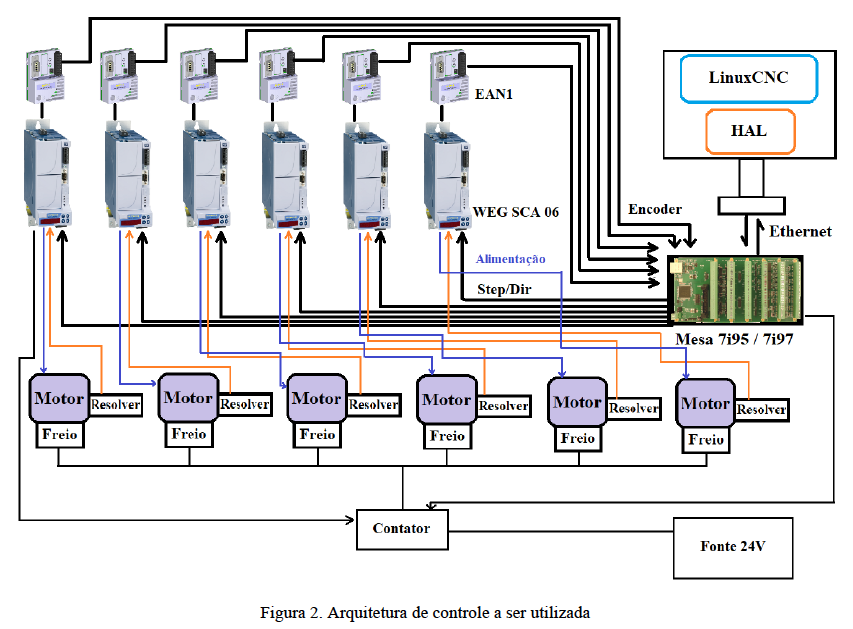
Tema: Retrofitting do robô ABB IRB 2000 usando LinuxCNC
Descrição:
O PFC1 tem como objetivo desenvolver uma metodologia de retrofitting do robô ABB IRB 2000 usando o controlador LinuxCNC, fazendo com que o robô volte a funcionar novamente. O Robô ABB IRB 2000 encontra-se inoperante devido à queima de seu controlador. De modo a recuperar sua operacionalidade, necessita-se desenvolver uma metodologia de retrofitting para o mesmo e definir uma nova arquitetura para o seu controlador baseado em LinuxCNC, bem como realizar a substituição de seu sistema de controle e, consequentemente, dos servoconversores (circuitos de acionamento elétrico dos motores comandados pelo controlador LinuxCNC), possibilitando a extensão de sua vida útil, além de prover, aos alunos de graduação em engenharia mecatrônica e de pós-graduação em sistemas mecatrônicos, um sistema industrial real em que possam aplicar todos os conhecimentos adquiridos ao longo de seu tempo de formação na área de controle e automação.
Os servoconversores WEG e placas Mesa LinuxCNC para controle de movimento já foram adquiridos, o painel de comando já foi montado e o controlador baseado em LinuxCNC com a cinemática direta e inversa usando notação Denavit-Hartenberg já foi desenvolvido, bem como o Digital Twin do Robô, este desenvolvido parcialmente.
O PFC1 poderá ser desenvolvidos por dois alunos com interesse em robótica industrial e cinemática direta e inversa usando notação Denavit-Hartenberg, controle PID, controle discreto (Ladder), automação manufatura (Código G e CAD/CAM), programação em C++ e python, Linux, entre outros.
Contato: Este endereço de email está sendo protegido de spambots. Você precisa do JavaScript ativado para vê-lo. (início em 1/2024)
Orientadoras: Carla Koike (CIC) e Dianne Magalhães (ENM)
Proposta 1
Titulo: Simulação e Programação de robô móvel Educacional em Gazebo e Copelia Sim
Descrição: O kit de robótica educacional do projeto Ereko conta com quatro diferentes configurações e esse projeto consiste em construir o modelo simulado desse robô nos Simuladores Gazebo e Copelia Sim, assegurando-se que o programa escrito em simulação seja o mais próximo possível do programa de controle no robô real. Esse modelo fará parte das aula práticas da Disciplina de Fundamentos Computacionais de Robótica.
Requisitos Necessários:
- linguagem de programação Python ou C
Desejável:
- Gazebo ou Copelia Sim
- Arduino
Proposta 2
Titulo: Locomoção de Robô Cobra usando Aprendizado de Máquina
Descrição: O robô cobra disponível no Laboratório Ereko pode ser programado para se locomover em diversos padrões, dependendo de parâmetros a serem definidos no algoritmo de controle. Esse projeto consiste em usar aprendizado de máquina para encontrar os melhores conjuntos de parâmetros para cada padrão de locomoção.
Requisitos Necessários:
- Linguagem de programação Python ou C
- Gazebo
Desejável:
- Arduino
- Solid works e impressão 3D
Contato: Este endereço de email está sendo protegido de spambots. Você precisa do JavaScript ativado para vê-lo.
Orientadora: Flavia Maria Guerra de Sousa Aranha Oliveira (ENE)
Projeto 1: Desenvolvimento de algoritmos de processamento de sinais PPG para melhorar a acurácia da estimação de pressão arterial contínua sem braçadeira
Objetivo geral: Desenvolver e validar algoritmos de processamento de sinais para a extração de marcadores fisiológicos importantes a partir de sinais de PPG, com foco em indicadores relevantes à estimação de pressão arterial.
Projeto 2: Detecção das ondas PQRST no ECG
Objetivo geral: Desenvolver e validar algoritmos de análise de sinais eletrocardiográficos utilizando o ambiente MATLAB, visando facilitar a detecção de anomalias cardíacas através da identificação das ondas P, QRS e T.
Projeto 3: Análise de sinais de eletrocardiograma (ECG) utilizando a transformada wavelet
Objetivos:
- Explorar as bases teóricas e as implicações práticas da transformada de Fourier (utilizada no algoritmo de Pan-Tompkins) e na transformada wavelet no processamento de sinais, com foco em sua aplicação na análise de sinais ECG.
- Investigar as vantagens e limitações de ambas as transformadas, com ênfase na transformada wavelet por seu potencial de detecção de picos-R, mesmo na presença de ruídos de medição.
- Desenvolver e testar um método baseado em wavelet para detectar picos R em sinais de ECG usando MATLAB, visando superar os métodos tradicionais em precisão e confiabilidade.
Projeto 4: Desenvolvimento e validação de métodos para a remoção de ruídos e linha de base de sinais ECG utilizando CEEMDAN e transformada wavelet
Objetivo geral: Desenvolver e validar um método para eliminação de ruídos musculares e correção da linha de base em sinais ECG, combinando CEEMDAN e limiarização por wavelet, e avaliar sua eficácia em comparação com métodos tradicionais.
Contato: Este endereço de email está sendo protegido de spambots. Você precisa do JavaScript ativado para vê-lo.
Orientador: Geovany Borges (ENE)
Temas:
- Título: Controle servo-visual de robô manipulador para interação homem-computador. Pré-requisitos: programação C++ em Linux.
- Título: Aprendizagem por reforço aplicada a prótese robótica para amputados de membro inferior. Pré-requisitos: noções sobre aprendizagem por reforço baseado em modelo
- Título: Reconstrução 3D usando slices de imagens de ultrassom. Pré-requisitos: programação C++ em Linux.
- Título: Predição de patologias a partir de sequencias de imagens radiológicas. Pré-requisitos: programação C++.
- Título: Controle de inserção de agulha flexível para robô de biópsia. Pré-requisitos: programação C++.
- Título: Modelos e técnicas usadas em robôs biológicos. Pré-requisitos: sinais e sistemas
- Título: Rastreamento de múltiplos skeletons com câmeras kinect usando filtros bayesianos multimodais. Pré-requisitos: programação C++.
- Título: Avaliação de técnicas de controle de drones em controlador Pixhawk. Pré-requisitos: programação C++.
Contato: Interessados, mandar e-mail para Este endereço de email está sendo protegido de spambots. Você precisa do JavaScript ativado para vê-lo. com "Chamada Março 2024" no título.
Orientador: Walter Britto (ENM)
Tema 1: Desenvolvimento de uma bicicleta robotizada.
Resumo: Este tema busca modelar o controle de estabilidade para manter uma bicicleta na vertical e controlar sua trajetória sem uma pessoa nela. Envolve também instrumentar uma bicicleta real e fazer experimentos.
Vagas: Uma dupla.
Tema 2: Estudo e controle da eletroestimulação na mitigação de tremores.
Resumo: Estudar a eletroestimulação e desenvolver um controle para aplicá-la na diminuição de tremores de mal-parkison. Este trabalho seria continuação de de outro trabalho orientado.
Vaga: um aluno.
Tema 3: Estudo e Desenvolvimento de exoesqueleto com controle de equilíbrio.
Resumo: Os exoesqueletos são dispositivos para auxílio a pessoas com deficiência motora. Podem serem empregados na reabilitação ou na assistência. Esses dispositivos são geralmente para membros inferiores, na maioria é necessário o usuário ter condições de se equilibrar usando muletas. Existe outro tipo que faz o equilíbrio ativo, não sendo necessário o esforço do usuário. O objetivo deste trabalho é estudar este tipo, e desenvolver um projeto deste sistema que permita a caminhada com equilíbrio ativo.
Contato: Este endereço de email está sendo protegido de spambots. Você precisa do JavaScript ativado para vê-lo.